幚尡儌乕僪夝愅朄
儌乕僪夝愅偺婎杮偲偟偰丄扨弮側幙検-僶僱-尭悐偺SDOF宯偝傜偵MDOF宯偵娭偟偰丄儌乕僪僨乕僞偑偳偺傛偆偵寁嶼偝傟傞偐傪愢柧偟傑偡丅傑偨丄STARSystem偺僇乕僽僼傿僢僩張棟偵傛傞峔憿暔偺怳摦摿惈傪媮傔傞曽朄偍傛傃峔憿曄峏傗奜椡墳摎偺僔儈儏儗乕僔儑儞偵偮偄偰夝愢偟傑偡丅
侾丏怳摦儌僨儖
怳摦妛偱偼丄傑偢侾帺桼搙怳摦宯偵偮偄偰偺媍榑偐傜巒傔丄偦傟傪懡帺桼搙怳摦宯偵揥奐偡傞偺偑堦斒揑偱偡丅偦傟偧傟偺怳摦儌僨儖偼丄乽幙検乮M乯乿偲乽偽偹乮K乯乿偲乽僟儞僷乮C乯乿傪梡偄偰丄堦斒偵恾侾偺傛偆偵昞尰偝傟傑偡丅
[M]{X乭(t)} + [C]{X乫(t)} + [K]{X(t)} = {F(t)}丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂 乮侾乯
偙偺幃偺嵍曈偺俁崁偼丄嵍偐傜弴偵丄乽姷惈椡乿丄乽尭悐椡乿丄乽抏惈暅尦椡乿傪昞偟偰偍傝丄偦傟傜傪崌寁偟偨傕偺偑乽撪椡乿偵憡摉偟傑偡丅堦曽丄偙偺幃偺塃曈偼乽奜椡乿傪昞偟偰偄傑偡丅偡側傢偪丄塣摦曽掱幃偼撪椡偲奜椡偑掁傝崌偭偨忬懺傪帵偟偰偄傑偡丅懡帺桼怳摦宯偺応崌偼丄嵍曈偺俁崁偺學悢偑儅僩儕僢僋僗偺宍偵側傝丄宯偑 値帺桼搙側傜丄[M], [C], [K]偺偄偢傟傕値峴値楍偺惓曽儅僩儕僢僋僗偵側傝傑偡丅
(m11x1乭 + m12x2乭 + 乧 + m1nxn乭) + (c11x1乫 + 乧 + c1nxn乫) + (k11x1 + 乧 + k1nxn) = f1
(m21x1乭 + m22x2乭 + 乧 + m2nxn乭) + (c21x1乫 + 乧 + c2nxn乫) + (k21x1 + 乧 + k2nxn) = f2乧乧乧乧乧乧乧乧乧乧乧
(mn1x1乭 + mn2x2乭 + 乧 + mnnxn乭) + (cn1x1乫 + 乧 + cnnxn乫) + (kn1x1 + 乧 + knnxn) = fn丂 乮俀乯
偙傟傪捈愙夝偔偙偲偼丄捠忢偼彮偟栵夘側巇帠偱偡丅偦偙偱乽惓婯儌乕僪朄乿偱偼丄屌桳儌乕僪偺捈岎惈傪棙梡偟偰丄懡帺桼搙怳摦宯偺塣摦曽掱幃傪旕楢惉壔偟傑偡丅偙傟偼丄悢妛揑偵偼儅僩儕僢僋僗偺懳妏壔傪堄枴偟傑偡丅偟偨偑偭偰丄忋偵帵偟偨値帺桼搙偺楢棫旝暘曽掱幃偼丄師偵帵偡傛偆偵丄屌桳儌乕僪偛偲偵屳偄偵撈棫側侾帺桼搙旝暘曽掱幃偵暘夝偝傟傑偡丅
偙偺傛偆偵偡傟偽丄暋悢偺侾帺桼搙旝暘曽掱幃傪屳偄偵撈棫偵夝偔偙偲偵傛偭偰丄懡帺桼搙偺楢棫旝暘曽掱幃傪夝偔応崌偲摨摍偺夝傪摼傞偙偲偑偱偒傑偡丅偟偐傕丄堦斒偵晄昁梫側崅師偺屌桳儌乕僪傪徣棯偱偒丄夝偔傋偒侾帺桼搙旝暘曽掱幃偺悢傪戝暆偵尭偠偰寁嶼帪娫偺抁弅傪恾傞偙偲偑偱偒傑偡丅m11x1乭 + c11x1乫 + k11x1 = f1
m22x2乭 + c22x2乫 + k22x2 = f2
乧乧乧乧
mmmxm乭+cmmxm乫+kmmxm = fm丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂 丂丂丂丂丂丂 乮俁乯
乧乧乧乧
mnnxn乭 + cnnxn乫 + knnxn = fn
{X(t)}=[U]{z(t)} 丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂 丂丂丂丂丂丂丂丂 丂丂丂丂丂丂 乮係乯
偲偍偒丄偙傟傪慜弎偺塣摦曽掱幃偵戙擖偟傑偡丅偙偙偱丄{X(t)}偼暔棟揑側曄埵儀僋僩儖丄{z(t)}偼儌乕僪曄埵儀僋僩儖傪昞偟傑偡丅値峴倣楍偺偙偺曄姺儅僩儕僢僋僗[U]偼丄儌乕僪僔僃乕僾丒儅僩儕僢僋僗偲傕屇偽傟傑偡丅
丂丂
偝偰丄乮係乯幃傪慜弎偺塣摦曽掱幃偵戙擖偡傞偲丄師幃偺傛偆偵彂偒偐偊傜傟傑偡丅
[m]{z乭(t)} + [c]{z乫(t)} + [k]{z(t)} = [U]t{F(t)}丂丂丂丂丂丂丂丂 丂丂丂丂丂丂丂 乮俆乯
偙偙偱丄倣偼儌乕僪悢傪昞偟傑偡丅[m], [c], [k]偼丄偦傟偧傟乽儌乕僪幙検儅僩儕僢僋僗乿丄乽儌乕僪尭悐儅僩儕僢僋僗乿丄乽儌乕僪崉惈儅僩儕僢僋僗乿偲屇偽傟丄師幃偱昞偝傟傞傛偆偵丄偄偢傟傕倣峴倣楍偺懳妏儅僩儕僢僋僗偱偡丅
[m] = [U]t[M][U]
[c] = [U]t[C][U] 丂丂丂丂 乮俇乯
[k] = [U]t[K][U]
慜弎偺儌乕僪儅僩儕僢僋僗傪巊偭偰彂偒偐偊傜傟偨塣摦曽掱幃偼丄儌乕僪幙検偑偡傋偰侾乮扨埵乯偵側傞傛偆偵儌乕僪儀僋僩儖傪僗働乕儕儞僌偡傞偙偲偵傛偭偰丄師偺傛偆偵丄偝傜偵曋棙側宍偵曄姺偱偒傑偡丅
[I]{z乭(t)} + [2兡兌]{z乫(t)} + [兌2]{z(t)} = [U]t{F(t)}丂丂丂丂丂丂丂丂丂丂丂丂丂丂乮俈乯
偨偩偟丄[I] =
[U]t[M][U]丂丂丂丂乮扨埵儌乕僪幙検儅僩儕僢僋僗乯
丂丂丂丂丂[2兡兌] = [U]t[C][U]丂丂乮儌乕僪尭悐儅僩儕僢僋僗乯
丂丂丂丂丂[兌2] =
[U]t[K][U] 乮儌乕僪崉惈儅僩儕僢僋僗乯
偙偺幃偼丄幚尡儌乕僪夝愅偵偍偄偰嵟廔揑偵媮傔傛偆偲偟偰偄傞丄峔憿暔偺摦摿惈乮儌乕僪摿惈乯傪娷傫偩宍偱昞偝傟偰偄傑偡丅丂丂
偝偰丄峔憿暔偺摦摿惈傪媮傔傞曽朄偵偼丄婎杮揑偵俀偮偺曽朄丄偡側傢偪丄
仠桳尷梫慺朄偵婎偯偄偰儌僨儖壔傪峴偄丄摨師曽掱幃偺夝偲偟偰峔憿暔偺摦摿惈傪媮傔傞曽朄丅乮偙傟偼屌桳抣夝愅偲傕尒側偡偙偲偑偱偒丄屌桳抣偐傜儌乕僪廃攇悢偲儌乕僪尭悐偑摼傜傟丄屌桳儀僋僩儖偐傜儌乕僪僔僃乕僾偑摼傜傟傞丅乯
仠幚尡僨乕僞偐傜峔憿暔偺摦摿惈傪媮傔傞曽朄丅乮偙偺曽朄偱偼丄廃攇悢椞堟偺峔憿暔偺儌僨儖偲幚嵺偺寁應偵傛偭偰峔憿暔偐傜偐傜摼傜傟傞廃攇悢墳摎娭悢乮俥俼俥乯僨乕僞偑梡偄傜傟傞丅廃攇悢墳摎娭悢偺寁應偼丄FFT僗儁僋僩儔儉丒傾僫儔僀僓偱峴偆丅乯
偑偁傝傑偡丅偙偙偱弎傋傞幚尡儌乕僪夝愅朄偼丄傕偪傠傫屻幰偺曽朄偱偡丅
係丏儔僾儔僗曄姺
偙傟傑偱弎傋偰偒偨塣摦曽掱幃偼丄帪娫椞堟偺旝暘曽掱幃偱昞偝傟偰偄傑偡丅儔僾儔僗曄姺偼丄偙偺帪娫椞堟偺旝暘曽掱幃傪丄偦傟偲摍壙側廃攇悢椞堟偺戙悢曽掱幃偵曄姺偡傞悢妛揑庤朄偱偡丅偦偙偱丄乮侾乯幃偺塣摦曽掱幃傪儔僾儔僗曄姺偡傞偲丄[[M]s2 + [C]s + [K]] {X(s)} = [B(s)]{X(s)} = {F(s)}丂丂丂丂丂丂丂丂丂丂丂丂丂丂乮俉乯
偲側傝傑偡丅偙偺幃偺嵍曈偺[ ]偱偔偔傜傟偨儔僾儔僗曄悢s偵娭偡傞2師幃偼丄乽僔僗僥儉丒儅僩儕僢僋僗乿偲屇 偽傟丄偙傟傪[B(s)]偱昞偡偲丄
[B(s)] = [M]s2 + [C]s + [K] 丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂乮俋乯
偲側傝傑偡丅乮俉乯幃偺夝偼丄屌桳抣偑僔僗僥儉丒儅僩儕僢僋僗偺峴楍幃傪丄|B(s)|=0偲偟偨偲偒偺丄儔僾儔僗曄悢 s 偺抣偲側傞傛偆側屌桳抣栤戣傪昞偟偰偄傑偡丅
{X(s)} = [H(s)]{F(s)}丂丂丂丂丂丂丂 丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂乮10乯
師幃偱帵偟偨値峴値楍偺揱払儅僩儕僢僋僗偺奺梫慺偼丄儔僾儔僗曄悢偺娭悢偱丄揱払娭悢偲屇偽傟偰偄傑偡丅屄乆偺揱払娭悢偼丄偁傞摿掕偺擖椡壛怳帺桼搙偲偁傞摿掕偺墳摎帺桼搙偲偺娫偺丄峔憿暔偺摦摿惈傪姰慡偵婰弎偟偨傕偺偱偁傝丄偟偨偑偭偰揱払儅僩儕僢僋僗偼姰慡側僟僀僫儈僢僋儌僨儖傪昞偟偨傕偺偱偡丅
丂丂丂丂丂丂丂丂丂乮11乯
僔僗僥儉儅僩儕僢僋僗[B(s)]偺梫慺偼儔僾儔僗曄悢s偺2師娭悢偱偁傝丄揱払儅僩儕僢僋僗[H(s)]偼偦偺僔僗僥儉儅僩儕僢僋僗偺媡儅僩儕僢僋僗偲偟偰掕媊偝傟傑偡偐傜丄[H(s)]偺梫慺偼奺揱払娭悢偺暘曣偵偍偄偰[B(s)] 偺峴楍幃傪帩偮懡崁幃偺娭悢偵側傝傑偡丅怳摦儌僨儖偑値師尦偱偁傟偽丄[B(s)]偼2師偺懡崁幃 乮偙傟傪摿惈曽掱幃偲偄偆乯偲側傝丄俀値屄偺崻偐値懳偺暋慺嫟栶崻乮暋慺屌桳抣傑偨偼嬌偲偄偆乯傪帩偪傑偡丅峴楍幃|B(s)|偺崻偑偡傋偰憡堎側傞偲壖掕偡傞偲丄[H(s)]偼師偺傛偆側晹暘暘悢偺宍偱彂偒昞偡偙偲偑偱偒傑偡丅
丂丂丂丂丂丂乮12乯
晹暘暘悢偺奺崁偼丄暘曣偵嬌偺抣偑擖偭偰偍傝丄暘巕偵偼儗僕僨儏偲屇偽傟傞掕悢偑擖偭偰偄傑偡丅[Rk] 偼丄倠斣栚偺嬌偵懳偡傞儗僕僨儏儅僩儕僢僋僗偲屇偽傟傞値峴値楍偺惓曽儅僩儕僢僋僗偱偡丅忋幃偐傜柧傜偐側傛偆偵丄s=pk 傑偨偼 s=pk' 偺偲偒揱払娭悢偼柍尷戝偲側傝傑偡丅偦偟偰偦偺偲偒偺廃攇悢偑偄傢備傞屌桳怳摦悢偱偁傝丄儌乕僪摿惈偲偟偰偺儌乕僪廃攇悢乮嫟怳廃攇悢乯偵懳墳偟傑偡丅
揱払儅僩儕僢僋僗傪乮12乯幃偺傛偆側晹暘暘悢昞尰偱彂偒昞偟偨屻丄暘巕偺儗僕僨儏儅僩儕僢僋僗傪儌乕僪儀僋僩儖乮儌乕僪僔僃乕僾乯偺崁偱彂偒捈偡偲丄乮13乯幃偵帵偡傛偆偵丄揱払儅僩儕僢僋僗偼偝傜偵娙扨側傕偺偵側傝傑偡丅偨偩偟丄uk偼倠斣栚偺儌乕僪儀僋僩儖偱偡丅
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂乮13乯
偙傟偼丄揱払儅僩儕僢僋僗乮偡側傢偪丄姰慡側僟僀僫儈僢僋儌僨儖乯偑丄儌乕僪僷儔儊乕僞傪娷傓僷儔儊僩儕僢僋側昞尰偵抲偒姺偊傜傟偨偙偲傪堄枴偟傑偡丅偟偐傕偙傟偼丄乮俈乯幃偱昞偝傟偨僟僀僫儈僢僋儌僨儖偲姰慡偵摍壙偱偡丅偙偺偙偲偐傜丄乽幚尡偵偍偄偰幚嵺偵應掕偝傟偨揱払儅僩儕僢僋僗偲摍壙側揱払儅僩儕僢僋僗傪丄寁嶼偵傛偭偰慻傒棫偰傞偙偲偝偊偱偒傟偽丄儌乕僪僷儔儊乕僞傪媮傔傞偙偲偑偱偒傞乿偲偄偆偙偲偑暘偐傝傑偡丅
埲忋偺偙偲偐傜丄幚尡儌乕僪夝愅偱偼丄懳徾峔憿暔傪値峴値楍偺揱払儅僩儕僢僋僗傪巊偭偰儌僨儖壔偟丄幚嵺偺壛怳帋尡傪捠偟偰偦偺儅僩儕僢僋僗偺1峴暘丄傕偟偔偼1楍暘偵憡摉偡傞値屄偺揱払娭悢傪應掕乮巆傝偼寁嶼偵傛偭偰曗姰乯偟傑偡丅偦偟偰丄僇乕僽僼傿僢僥傿儞僌乮嬋慄揔崌乯偲屇偽傟傞庤朄傪梡偄偰丄應掕偟偨揱払娭悢偲摍壙側揱払娭悢傪寁嶼偵傛偭偰慻傒棫偰丄懳徾峔憿暔偺儌乕僪摿惈乮儌乕僪廃攇悢乮嫟怳廃攇悢乯丄儌乕僪尭悐斾丄儌乕僪僔僃乕僾乯傪媮傔傑偡丅偙傟傜偺儌乕僪摿惈偼丄乽儌乕僪僷儔儊乕僞乿偲屇偽傟偰偄傑偡丅
俇丏侾丂幚尡儌乕僪夝愅偺昗弨揑庤弴
幚尡儌乕僪夝愅偺昗弨揑側庤弴傪帵偡偲丄埲壓偺傛偆偵側傝傑偡丅
嘆弶婜愝掕
嘇峔憿暔偺宍忬掕媊
嘊廃攇悢墳摎娭悢偺寁應
嘋儌乕僪偺幆暿乛僇乕僽僼傿僢僥傿儞僌乛儌乕僪僷儔儊乕僞偺悇掕
嘍寢壥偺昡壙乮儌乕僪傾僯儊乕僔儑儞側偳乯
嘐寢壥偺墳梡乮峔憿曄峏僔儈儏儗乕僔儑儞丄奜椡墳摎僔儈儏儗乕僔儑儞丄幚壱摦夝愅丄僔僗僥儉摨掕側偳乯
偙偺偆偪丄嘍偲嘐偼幚尡儌乕僪夝愅偦偺傕偺偱偼側偔丄偄傢偽億僗僩丒僾儘僙僢僔儞僌乮屻張棟乯偵懏偡傞傕偺偱偡丅嘋偑幚尡儌乕僪夝愅偵偍偗傞嵟傕廳梫側僾儘僙僗偱偁傞偙偲丄偡側傢偪偦偺梫偲側傞僇乕僽丒僼傿僢僥傿儞僌偺惛搙偑嵟傕廳梫偱偁傞偙偲偼丄偄偆傑偱傕偁傝傑偣傫丅
俇丏俀丂廃攇悢墳摎娭悢偺掕媊偲寁應曽朄
傕偆堦搙丄乮10乯幃傪尒偰傒傑偟傚偆丅偙傟偼揱払儅僩儕僢僋僗傪巊偭偰昞偟偨塣摦曽掱幃偱偡偑丄擖椡壛怳{F(s)乸偲弌椡墳摎{X(s)}偺娭學傪昞偡幃偲峫偊傞偙偲傕偱偒傑偡丅偙傟偼丄揱払儅僩儕僢僋僗偺梫慺偱偁傞揱払娭悢偵偮偄偰傕摨條偱偡丅偡側傢偪丄揱払娭悢偼宯偵偍偗傞擖椡偲弌椡偺斾偲偟偰掕媊偝傟傑偡丅怳摦妛偺暘栰偱偼丄偙傟傜偺擖椡傕弌椡傕怳摦悢乮廃攇悢乯偱昞偝傟傞傕偺偑懡偄偙偲偐傜丄怳摦悢乮廃攇悢乯傪撈棫曄悢偵尒偨偰偰丄偦偺娭悢偲偟偰掕媊偟偨揱払娭悢偺偙偲傪丄摿偵廃攇悢墳摎娭悢乮FRF乯偲屇傫偱偄傑偡丅偟偨偑偭偰丄幚尡儌乕僪夝愅朄偱傕丄惓偟偔偼揱払娭悢偺偙偲傪廃攇悢墳摎娭悢偲偄偄傑偡丅
廃攇悢墳摎娭悢乮FRF乯儅僩儕僢僋僗偺梫慺傪媮傔傞嵟傕娙扨側曽朄偼丄堦搙偵堦偮偢偮廃攇悢墳摎娭悢傪應掕偡傞偙偲偱偡丅恾俀偵帵偟偨娙扨側俀師尦偺応崌偼丄FRF儅僩儕僢僋僗偺嵍忋偺梫慺h11(冎)偼丄揰斣崋侾偱峔憿暔傪壛怳偟丄揰斣崋侾偱偦偺墳摎傪應掕偡傞偙偲偵傛偭偰寁應偝傟傑偡丅偦偟偰丄FRF 偼墳摎偺僼乕儕僄曄姺傪壛怳偺僼乕儕僄曄姺偱彍偟偰昞尰偝傟傑偡丅摨條偵丄戞1峴偺2斣栚偺梫慺 h12乮冎乯偼丄揰斣崋俀偱峔憿暔傪壛怳偟丄揰斣崋侾偱偺墳摎偺僼乕儕僄曄姺傪揰斣崋俀偱偺壛怳奜椡偺僼乕儕僄曄姺偱彍偡偙偲偵傛偭偰寁應偝傟傑偡丅2峴栚偺梫慺偵偮偄偰傕丄摨條側曽朄偱寁應偝傟傑偡丅
恾俀丂廃攇悢墳摎娭悢偺應掕曽朄
俇丏俁丂僇乕僽僼傿僢僥傿儞僌偵傛傞儌乕僪僷儔儊乕僞偺悇掕
捠忢偺壛怳帋尡偵偍偄偰摼傜傟傞怳摦儌乕僪偼堦斒偵楢惉偟偰偄傑偡偺偱丄偦偺楢惉偺搙崌偄乮椬愙偡傞儌乕僪嫟怳嬋慄偵傛傞塭嬁偺搙崌偄乯偵傛偭偰丄揔梡偡傞僇乕僽僼傿僢僥傿儞僌偺庤朄傪慖戰偟側偗傟偽側傝傑偣傫丅僇乕僽僼傿僢僥傿儞僌偺庤朄偼丄偙傟傑偱偵悢懡偔峫埬偝傟偰偒傑偟偨偑丄偦傟傜偼
嘆侾帺桼搙朄乮SDOF朄乯
嘇懡帺桼搙朄乮MDOF朄乯
恾俁丂俽俢俷俥朄偲俵俢俷俥朄偺揔梡慖戰
偵戝暿偝傟傑偡丅恾俁偼丄儌乕僪楢惉偺搙崌偄偵墳偠偰揔梡偡傞僇乕僽僼傿僢僥傿儞僌庤朄偺堘偄傪帵偟偨傕偺偱丄恾偺傛偆偵丄楢惉偺搙崌偄偄偑庛偄応崌偼俽俢俷俥朄傪丄傑偨楢惉偺搙崌偄偑嫮偄応崌偼俵俢俷俥
朄傪丄偦傟偧傟揔梡偟傑偡丅
侾帺桼搙朄偺僇乕僽僼傿僢僥傿儞僌庤朄偺堦偮偱丄傛偔抦傜傟偨乽懡崁幃朄乮億儕僲儈傾儖朄乯乿偼丄奺怳摦儌乕僪偵懳偟偰丄儌乕僪廃攇悢丄儌乕僪尭悐斾丄儌乕僪儗僕僨儏傪摨帪偵悇掕偱偒傞懡崁幃宆偺僇乕僽僼傿僢僥傿儞僌丒傾儖僑儕僘儉偱偡丅偙偺庤朄偱偼丄廃攇悢墳摎娭悢乮FRF乯傪師幃偺傛偆偵掕媊偟傑偡丅
H(j冎) = (Rk2冃k + R1k冎k + jR2k冎乯/(冃k2 + 冎k2冎 + 2j冃k冎)+ A0 + A1(j冎) + A2(冎2) 丂丂丂乮14乯
偙偺庤朄偱偼丄僇乕僽丒僼傿僢僥傿儞僌偺寢壥丄儌乕僪廃攇悢乮冎k乯丄儌乕僪尭悐棪乮冃k乯偍傛傃暋慺儗僕僨儏乮Rk=R1k+R2k乯偑摼傜傟傑偡丅傑偨丄應掕僨乕僞偺懷堟偵偍偄偰懷堟奜儌乕僪偺塭嬁偵懳偡傞曗惓傪峴偆俁偮偺曗惓崁偺學悢乮A0, A1, A2乯傕丄僇乕僽丒僼傿僢僥傿儞僌偺夁掱偱媮傔傜傟傑偡丅
俈丏儌乕僪夝愅僜僼僩僂僃傾
巗斕偝傟偰偄傞僷僜僐儞梡偺幚尡儌乕僪夝愅僜僼僩僂僃傾偺拞偱丄傕偭偲傕懡偔偺僥僗僩丒僄儞僕僯傾偵妶梡偝傟偰偄傞STAR
System偵偮偄偰丄娙扨偵怗傟偰偍偒傑偟傚偆丅乮徻偟偔偼丄偙偺儂乕儉儁乕僕偺乽僔僗僥儉忣曬乿傪偛棗偵側傞偐丄壓婰偺揹巕儊乕儖傾僪儗僗偵娭楢帒椏傪偛惪媮壓偝偄乯丅
俈丏侾丂STARSystem 偺峔惉
STARSystem偼丄幚尡儌乕僪夝愅偺婎杮儌僕儏乕儖偱偁傞STARModal乮僗僞乕儌乕僟儖乯偲丄偙傟偵峔憿曄 峏僔儈儏儗乕僔儑儞乮俽俢俵乯傗奜椡墳摎僔儈儏儗乕僔儑儞乮俥俼俽乯丄幚壱摥夝愅乮俷俢俽乯丄懡揰嶲徠朄僇乕僽僼傿僢僥傿儞僌乮俙俠俥乯側偳偺僆僾僔儑儞丒儌僕儏乕儖傪壛偊偨僼儖婡擻偺STARStruct乮僗僞乕僗僩儔僋僩乯偐傜峔惉偝傟偰偄傑偡丅昞侾偼丄STARSystem偺峔惉傪帵偟偰偄傑偡丅昞侾丂STAR System偺峔惉
|
STARModal |
丂 | 幚尡影霓夝愅刻某 |
|
STARStruct |
STARModal |
摨 忋 |
|
SDM :Structural Dynamics Modification |
峔憿曄峏夹凹 | |
|
FRS :Forced Response Simulation |
奜椡墳摎夹凹 | |
|
ACF :Advanced Curve Fitting |
懡揰嶲徠朄栋剔台ㄝ皋 | |
|
ODS :Operating Deflection Shape |
幚壱摥夝愅 | |
|
TDA :Time Domain Analysis |
帪娫椞堟夝愅 |
俈丏俀丂STARModal幚尡儌乕僪夝愅婎杮僜僼僩僂僃傾
 恾係丂STAR
System偺弶婜夋柺乮僎乕僩僂僃僀乯
恾係丂STAR
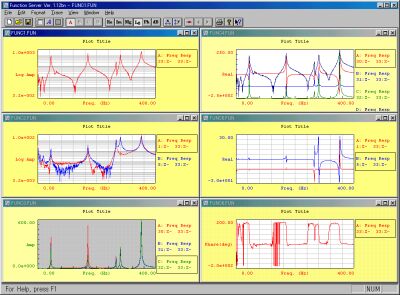
System偺弶婜夋柺乮僎乕僩僂僃僀乯STARModal偼丄幚尡儌乕僪夝愅偵昁梫側偡傋偰偺婡擻丄偡側傢偪丄僾儘僕僃僋僩偺搊榐乮弶婜愝掕乯丄儌僨儖偺掕媊丄寁應偺惂屼丄寁應僨乕僞偺昞帵丄僇乕僽僼傿僢僥傿儞僌乮SDOF,MDOF乯丄帺摦僼傿僢僥傿儞僌丄儌乕僪丒傾僯儊乕僔儑儞丄儌乕僪怣棅惈昡壙娭悢乮MAC乯側偳傪旛偊偨丄僗僞儞僪傾儘儞偱巊梡壜擻側僜僼僩僂僃傾偱偡丅
俈丏俁丂俽俢俵峔憿曄峏僔儈儏儗乕僔儑儞丒僾儘僌儔儉
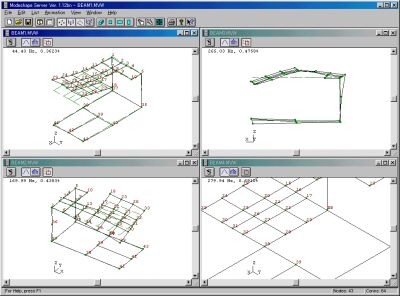
偙傟偼STARModal偵傛偭偰媮傔傜傟偨峔憿暔偺儌乕僪摿惈傪傕偲偵丄峔憿暔偵壖憐偺幙検傗丄偽偹傗丄僟儞僷傪壛偊偨傝尭偠偨傝偟偰峔憿暔傪壖憐曄峏偟丄偦偺岠壥傪僔儈儏儗乕僩偡傞僾儘僌儔儉偱偡丅摨帪懡揰 峔憿曄峏傗丄嫟怳曄峏丄摦媧怳婍愝寁側偳丄偝傑偞傑側婡擻傪旛偊偰偄傑偡丅恾俆偼丄SDM偺奣擮傪昤偄偨恾偱偡丅
俈丏係丂俥俼俽奜椡墳摎僔儈儏儗乕僔儑儞丒僾儘僌儔儉
恾俇丂奜椡墳摎僔儈儏儗乕僔儑儞
偙傟偼STARModal偵傛偭偰媮傔傜傟偨峔憿暔偺儌乕僪摿惈傪巊偭偰丄婛抦偺奜椡偵懳偡傞峔憿暔偺梊應偝傟傞墳摎傪娤嶡偡傞僔儈儏儗乕僔儑儞丒僾儘僌儔儉偱偡丅峔憿暔偺擟堄偺揰偵嶌梡偡傞挷榓壛怳椡偵傛傞墳摎傪丄曄埵乛懍搙乛壛懍搙偵偮偄偰寁嶼偡傞惓尫攇僔儈儏儗乕僔儑儞偲丄峔憿暔偺擟堄偺揰偵暋悢偺壛怳椡偑嶌梡偟偨偲偒偺曄埵乛懍搙乛壛懍搙偺帺屓僷儚乕僗儁僋僩儔儉傪寁嶼偡傞廃攇悢僔儈儏儗乕僔儑儞偑壜擻偱偡丅恾俇偼丄俥俼俽偺奣擮傪昤偄偨恾偱偡丅
俈丏俆丂俙俠俥懡揰嶲徠朄僇乕僽丒僼傿僢僥傿儞僌丒僾儘僌儔儉
偙傟偼億儕儗僼傽儗儞僗丒僇乕僽僼傿僢僥傿儞僌朄偲傕屇偽傟傞丄戝宆峔憿暔傗懳徧惈偺嫮偄峔憿暔偺夝愅偵揔偟偨僇乕僽僼傿僢僥傿儞僌庤朄偱偡丅1揰壛怳懡揰墳摎乮俽俬俵俷乯傗懡揰壛怳懡揰墳摎乮俵俬俵俷乯偺僨乕僞偵懳偡傞恀偺僌儘乕僶儖屌桳怳摦悢乛尭悐偺悇掕偑壜擻偱偡丅丂
俈丏俇丂俷俢俽幚壱摦夝愅僾儘僌儔儉
 丂丂
丂丂
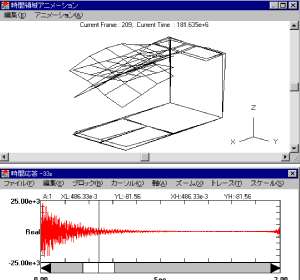
恾俉丂幚壱摥夝愅
偙傟偼塣揮忬懺偵偁傞婡夿峔憿暔偺墳摎摿惈傪娤嶡偡傞偨傔偺僾儘僌儔儉偱丄屄乆偺屌桳怳摦悢偱偺儌乕僪僔僃乕僾傪慄宍寢崌偟偨寢壥傪傾僯儊乕僔儑儞昞帵偟傑偡丅幚嵺偺婡夿峔憿暔偑壱摦偟偰偄傞忬懺偱應掕傪峴偄丄栤戣偲側偭偰偄傞廃攇悢偱偺摦揑曄宍僷僞乕儞傪娤嶡偡傞偙偲偵傛傝丄僩儔僽儖尰徾傪攃埇偟丄婋尟売強偺専弌丄怳摦乛憶壒栤戣偺懳嶔側偳偵棙梡偟傑偡丅俷俢俽偵偼丄廃攇悢墳摎娭悢偲僆乕僩僷儚乕偐傜寁嶼偡傞俥俼俥乛俙俹俽朄丄偍傛傃僋儘僗僷儚乕偲僆乕僩僷儚乕偐傜寁嶼偡傞俠俹俽乛俙俹俽朄偺2偮偺曽朄偑梡堄偝傟偰偄傑偡丅
俈丏俈丂俿俢俙帪娫椞堟夝愅僾儘僌儔儉
恾俋丂帪娫椞堟夝愅
慜弎偺俷俢俙偲堘偭偰丄俿俢俙偼帪娫椞堟偱偺峔憿暔偺摦揑嫇摦傪娤嶡偡傞偨傔偺僾儘僌儔儉偱偡丅弖帪偺徴寕傗僀儞僷僋僩帋尡偺墳摎丄夁搉忬懺偺旕慄宍嫇摦丄幚壱摦夝愅乮俷俢俽乯丄婡夿偺塣揮奐巒乛廔椆帪偺嫇摦側偳傪娤嶡偡傞偨傔偵巊梡偝傟傑偡丅
俽俿俙俼俼倕倫倧倰倲偺傕偆堦偮偺婡擻偱偁傞僼傽儞僋僔儑儞丒僒乕僶乕偼丄摨條偵儅儖僠僂傿儞僪僂偺僗僋儕乕儞忋偱丄廃攇悢墳摎娭悢傗僆乕僩僷儚乕丄僋儘僗僷儚乕丄僐僸乕儗儞僗側偳庬乆偺僨乕僞偺昞帵偑偱偒丄暋悢偺嬋慄偺摨帪昞帵傗丄倃幉乛倄幉偺僗働乕儖傗儔儀儖偺曄峏側偳偑帺桼偵峴偊傑偡丅
恾侾侾丂STARReport偺僼傽儞僋僔儑儞丒僒乕僶乕
儌乕僪僔僃乕僾丒僒乕僶乕傕僼傽儞僋僔儑儞丒僒乕僶乕傕丄捠忢偺儚乕僾儘偵幚尡儌乕僪夝愅寢壥偺僨乕僞傪杽傔崬傫偱丄儚乕僾儘忋偱慡偔摨條偺憖嶌傪峴偆偙偲偑偱偒傑偡丅偟偨偑偭偰丄幚尡儌乕僪夝愅傪峴偭偰偄傞応強偐傜棧傟偨偲偙傠偱傕丄儚乕僾儘傪巊偭偰儌乕僪夝愅偺寢壥傪帺桼偵昞帵僐儞僩儘乕儖偱偒傑偡丅
仠偍栤偄崌傢偣偍傛傃帒椏傪偛婓朷偺曽偼丄埲壓偵偛惪媮偔偩偝偄丅
仹211-0016 愳嶈巗拞尨嬫巗僲捸 66-5
LM晲憼彫悪戞2-215
TEL:044-738-0315
URL: Structural Science World E-mail: Structural Science Inc.
(SSI)